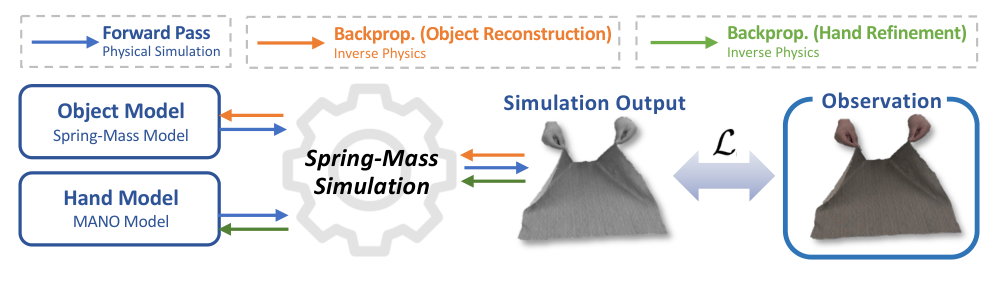
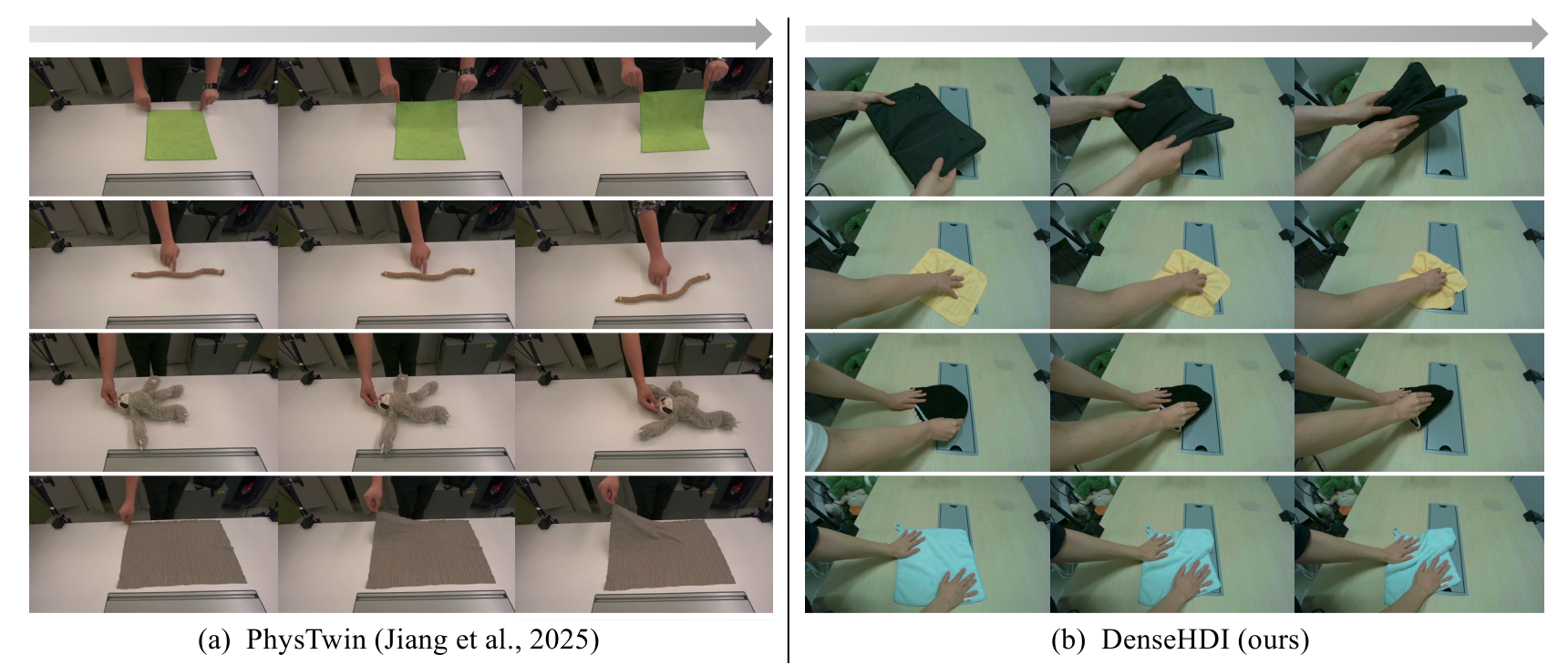
🛠 Method Overview
Given sparse-view RGB-D videos, PhysHanDI reconstructs a dense 3D hand–deformable object interaction model through a three-stage optimization pipeline: (1) hand reconstruction, fitting a dense parametric hand model (MANO) to the RGB-D observations; (2) object reconstruction, fitting a Spring–Mass model whose deformations are simulated from interaction forces induced by the reconstructed hand motions; and (3) hand refinement, which refines the hands via inverse physics using the fitted physics-based object model. Unlike previous linear pipelines, we establish a novel cyclical dependency: reconstructed 3D hand motions derive interaction forces for physically plausible object simulation, and the resulting deformable object provides an inverse-physics prior to refine the hand poses.